Säkerhetsrelaterade funktionsblock – övervakning av arbetsområde
Säkerhetsrelaterade funktionsblock – övervakning av arbetsområde
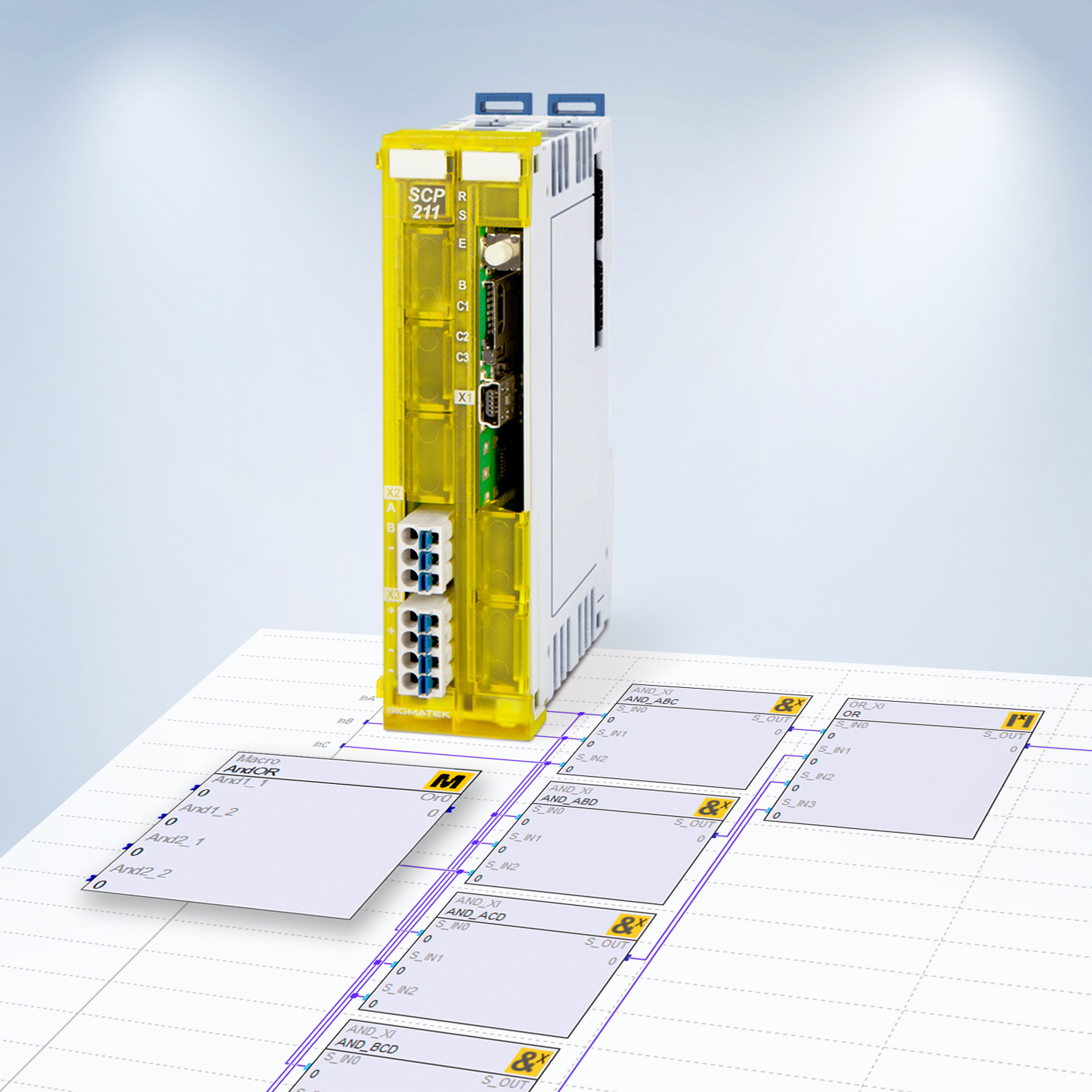
Allt som synergin mellan människor och robotar fördjupas är det av största vikt att garantera en säker arbetsmiljö. I LASAL SAFETYDesigner finns två nya tvåfunktionsblock. Dessa, i kombination med MDD 2000, Safety CPU SCP 211 och säkerhetsfunktionerna SLS (Safely Limited Speed) och SP (Safe Position) realiseras en skräddarsydd arbetsplatsövervakning för all seriell kinematik: ”Denavit-Hartenberg (DH) Transformation” och ”Collision Detection.” Användaren behöver bara ställa in lämpliga parametrar för att kunna använda dessa funktioner i sitt projekt.
Copyright SIGMATEK GmbH
DH Transformation
Funktionsblocket DH-transformation beräknar ett spatialt koordinatsystem. En fleraxlig robotarm kan realiseras genom att använda samma funktionsblock flera gånger. Funktionsblockets output representerar robotens TCP (Tool Center Point).
Collision Detection
Funktionsblocket Collision Detection har utvecklats för att detektera en kollision mellan Tool Center Point (TCP) för en robot och andra objekt. Arbetsytan definieras av min och max XYZ-koordinater. Arbetsyta är det område där TCP:n tillåts röra sig. Dessutom placeras en omslutande sfär över robotens aktuella position.
Kollisionsdetektering övervakar hela tiden det giltiga området och upptäcker en kollision genom att jämföra sfären med de definierade gränserna för arbetsområdet. Om roboten rör sig utanför detta definierade intervall kan användaren välja att agera på lämpligt sätt, t.ex. om man aktiverar nödstopp eller motsvarande.
Genom att länka samman enskilda arbetsytor är det också möjligt att skapa komplexa arbetsytor.